In een eerder voorbeeld heb ik op basis van luchtfoto’s een DSM en DTM gegenereerd. Toen bleek dat de standaardinstellingen in OpenDroneMap om het DTM te genereren, iets preciezer gezegd, om de pointcloud te classificeren, niet afdoende waren. Pas na finetuning kreeg ik een acceptabel resultaat. In dat voorbeeld heb ik een veelgebruikte kleurgradiënt gebruikt om hoogtes weer te geven. Blauw voor laag gelegen gebieden, terwijl rood de hogere delen weergeeft.
Nog duidelijker om het verschil door finetuning te visualiseren zijn een schaduwreliëf met contourlijnen. Hier heb ik het DTM zoals gegenereerd met de standaardinstellingen voorzien van een schaduwreliëf:

Je ziet net als bij het gebruik van de kleurgradiënt overduidelijk dat de kerk in het midden zo goed als verdwenen is, maar dat de huizen eromheen nog grotendeels zichtbaar zijn. Contourlijnen accentueren dit beeld:
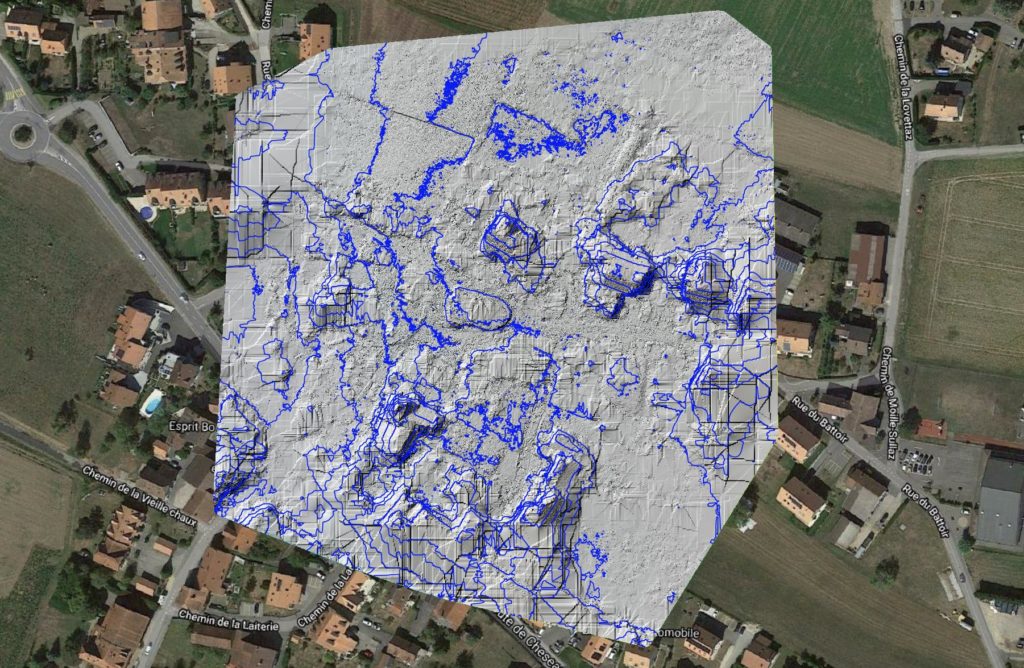
Naast elkaar liggende hoogtelijnen geven een hoogteverschil weer van 2 meter. Met name bij het akkerland boven zie je inderdaad weinig lijnen, maar bij de huizen die daaraan grenzen, neemt de dichtheid plots toe. Dit bevestigt dat de DTM nog veel resten van bebouwing bevat.
In het volgende plaatje heb ik het DTM na het finetunen voorzien van een schaduwreliëf. Ik heb hier meteen de hoogtecontouren aan toegevoegd:
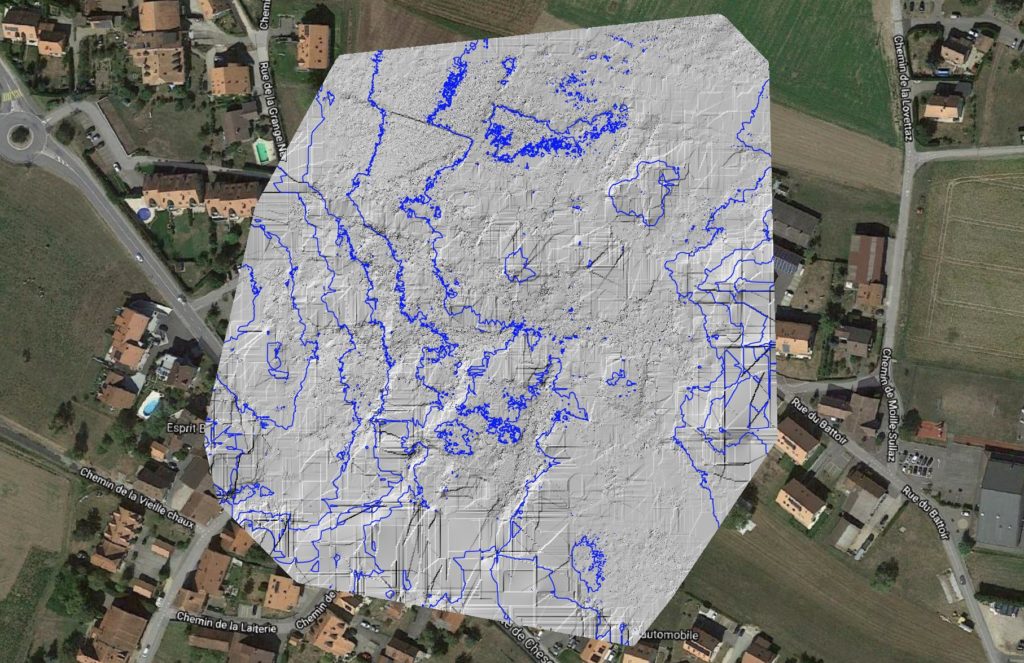
Zowel het reliëf als de contouren tonen nu dat het DTM sterk verbeterd is. Het reliëf toont immers nauwelijks nog waar bebouwing of vegetatie is, terwijl de contourlijnen nu wijd uit elkaar liggen. Dat laatste geeft aan dat het DTM een glooiend landschap representeert. Labels met hoogte-informatie bevestigen dit:
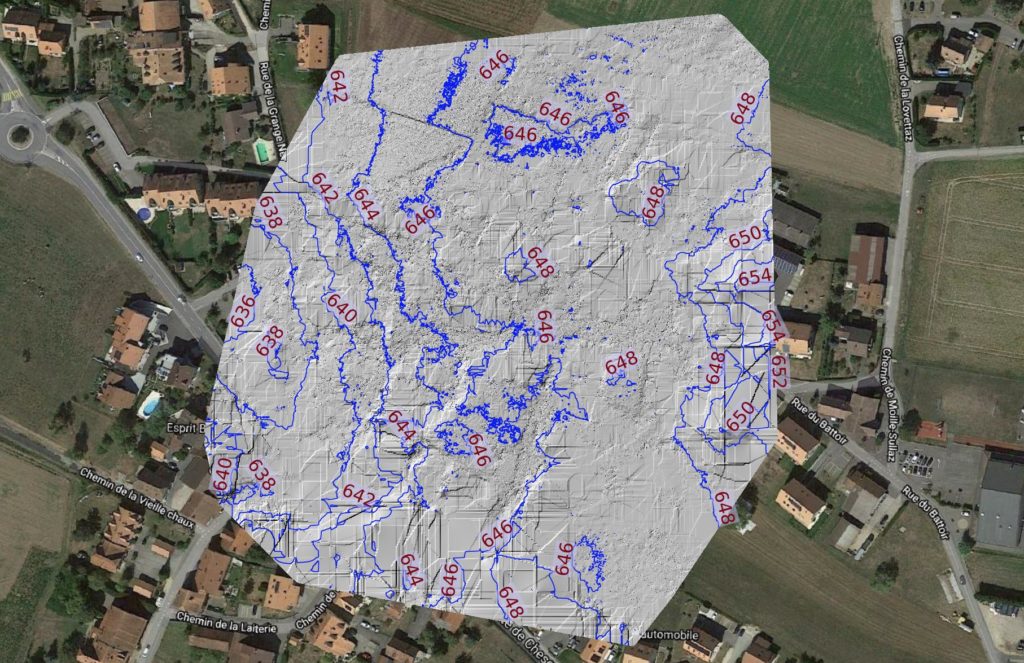
Aan de linkerkant is de hoogte van het terrein 636 meter. Je ziet dat naar rechts geleidelijk toenemen tot 654 meter. Dit stemt overeen met de kleurgradient van het vorige voorbeeld:
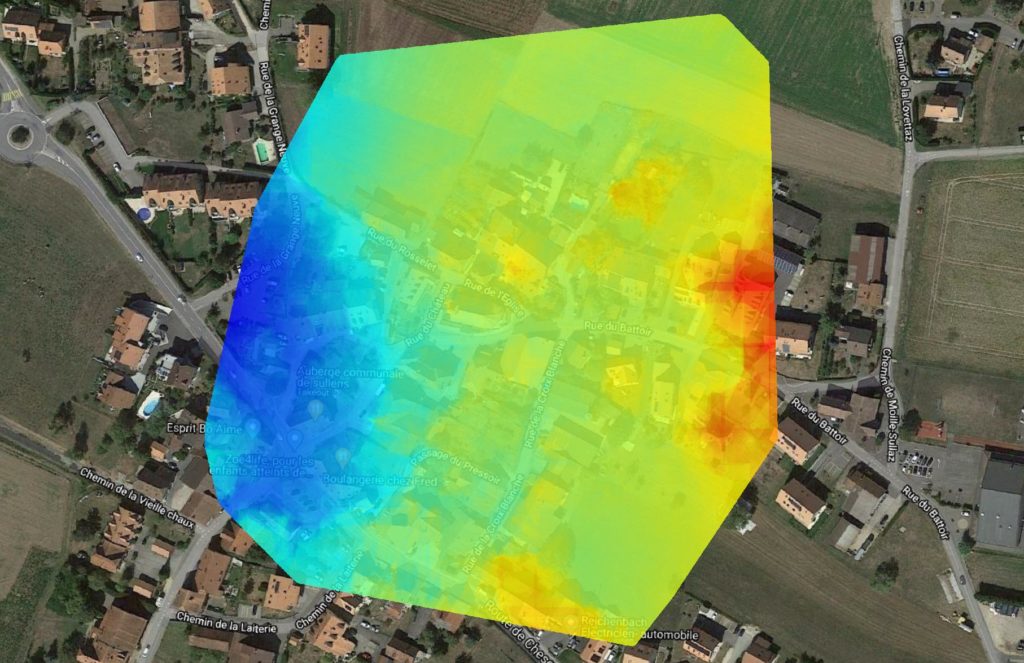
Hier correspondeert de blauwe kleur met een GPS-hoogte van 635 meter, terwijl rood 655 meter aangeeft.