Voor dit doel gebruik ik een dataset van senseFly die zij beschikbaar stellen voor leerdoeleinden. Het gaat om 37 foto’s genomen op een hoogte van slechts 40 meter. Daardoor zijn wel goed de hoogteverschillen van objecten ten opzichte van het terrein te zien. De geringe hoogte merk je ook aan de foto’s. Ze zijn niet zozeer loodrecht naar beneden (nadir), maar meer schuin (oblique) genomen:

Deze foto’s heb ik met OpenDroneMap verwerkt tot een point cloud van ongeveer 2,3 miljoen punten. Bekijk hem hier in je browser van je laptop of mobiel via de webgebaseerde viewer van Potree.
Behalve deze pointcloud heb ik eveneens een Digital Surface Model (DSM) en Digital Terrain Model (DTM) gegenereerd. Door de lage vlieghoogte van de drone zijn in het DSM de hoogte van de huizen en met name de kerk in het midden goed te zien:

Deze afbeelding heb ik gemaakt door in QGIS het DSM met Google Satellite te combineren. Zodoende is duidelijker dat de hogere delen van de foto inderdaad gebouwen zijn. De torenspits is het hoogst, zoals de rode kleur aangeeft. Dit correspondeert met een GPS-hoogte van 670 meter. Blauw is het laagst met 635 meter.
Het eerste resultaat van het DTM geeft een gemengde indruk:
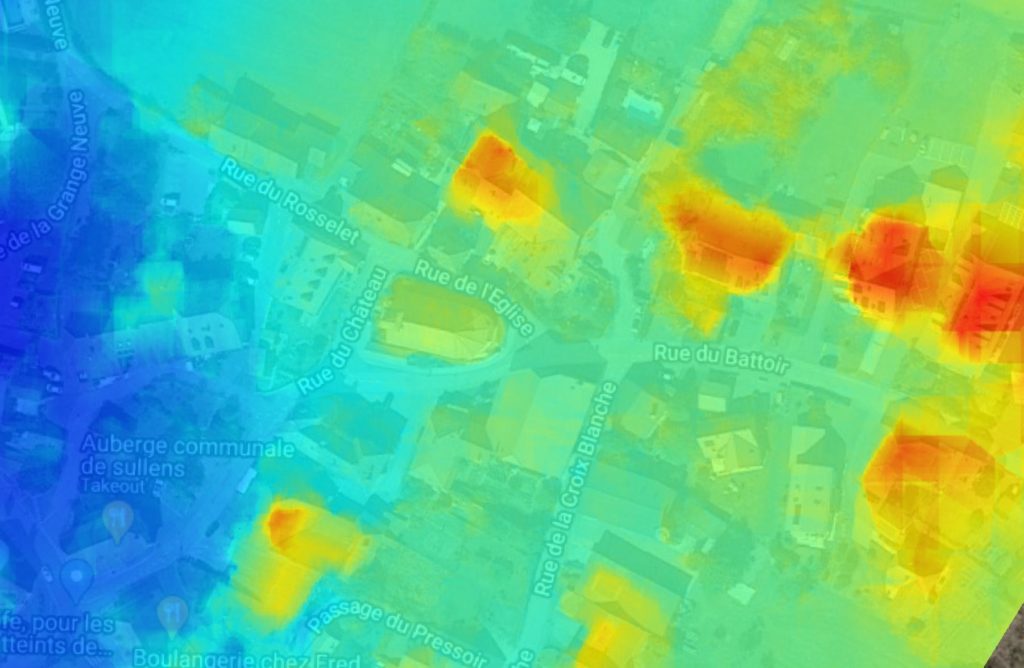
De kerk is weliswaar verdwenen, maar je ziet boven en rechts ervan overduidelijk nog huizen in het model zitten. Overigens geeft de kleur rood hier een GPS-hoogte van 660 meter aan, terwijl dat voor het DTM van zojuist 670 meter is. Blijkbaar is de kerkspits zo’n 10 meter hoog.
Door de generatie van het DTM fijn af te regelen krijg je een heel wat beter resultaat:

Nu correspondeert de rode kleur met een GPS-hoogte van 655 meter. Je ziet dat de kleurgradering nu veel gelijkmatiger verloopt. Het terrein loopt van links naar rechts geleidelijk omhoog van 635 meter naar 655 meter, een hoogteveschil dus van 20 meter.
Om het DTM te genereren gebruikt OpenDroneMap het zogeheten Simple Morphological Filter (SMRF). Hiermee bepaal je welke punten van de pointcloud tot het terrein behoren en welke punten juist structuren daarop voorstellen, zoals bomen of gebouwen. Dit heet classificatie van de pointcloud en werkt met de standaard instellingen in OpenDroneMap blijkbaar niet heel goed. Pas na aanpassen van de instellingen hiervoor krijg je een goed DTM.
In een ander voorbeeld heb ik schaduwreliëf in combinatie met contourlijnen gebruikt om het verschil in kwaliteit tussen deze twee DTM’s weer te geven. Dan komt ook duidelijker naar voren dat het rode deel van hierboven niet door de bebouwing komt, maar het gevolg is van het omhoog lopende terrein.